4.2. Moving in 2D#
![]()
Omniwheels are a great way to move omni-directionally in 2D.

4.2.1. Omni Wheels#
Omni wheels make omnidirectional movement possible.
An omni wheel is a wheel that, instead of a tire, has small rollers along its rim. The axes for these rollers are perpendicular to the wheel’s own axis. Because of this, unlike a conventional wheel, movement perpendicular to the wheel is not resisted, i.e., the wheel can slide effortlessly from left to right. Figure 1 (from Wikipedia) shows an example.

Apart from being potentially amazing for parallel parking, in robotics omni wheels are very popular because they enable omni-directional movement of robot platforms.
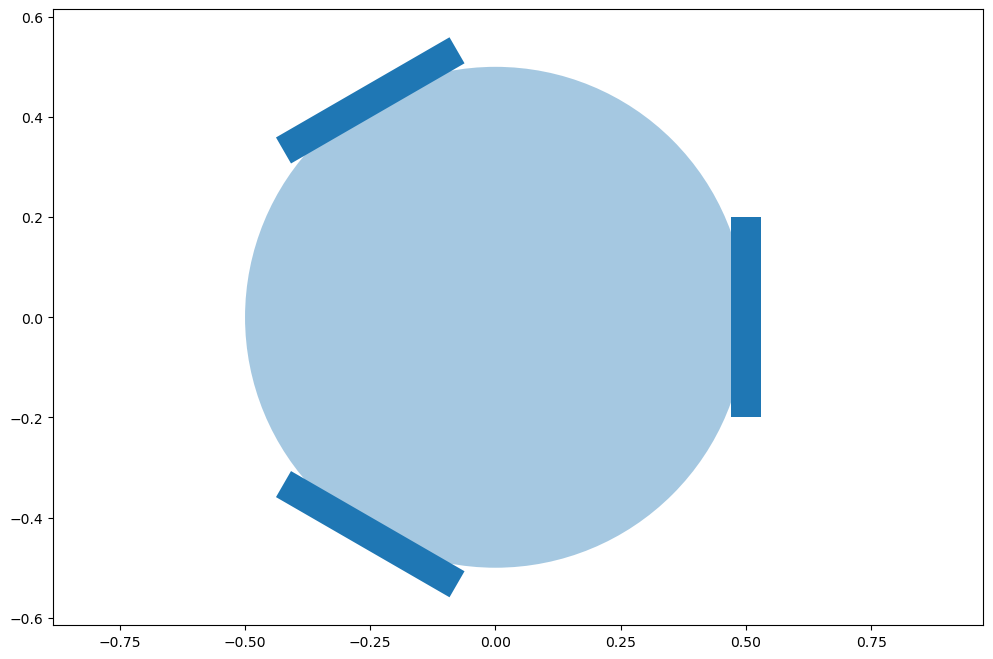
As an example, let us imagine that our warehouse robot is circular and has three omni wheels mounted on its rim. The coordinates of each wheel, in body coordinates, are
where \(R\) is the radius of the robot. The angle \(\theta^i\) is angle between the robot’s x-axis and the wheel’s axis. As we will see below, this configuration of wheels allows the robot to move instantaneously in any direction in the plane.
In code, we create a small function:
R = 0.50 # robot is circular with 50 cm radius
r, w = 0.20, 0.06 # wheel radius and width
num_wheels = 3
def wheel_pose(i:int):
"""Return x,y, and theta for wheel with given index."""
theta = float(i)*np.pi*2/num_wheels
px, py = R*np.cos(theta), R*np.sin(theta)
return px, py, theta
This yields the configuration in Figure 2.
4.2.2. Kinematics of Omni Wheels#
Relating the robot velocity to the wheel velocities.
Kinematics is the study of motion, without regard for the forces required to cause the motion. In particular, for our omni-directional robot, kinematics addresses the question “What should the individual wheel velocities be, given that we want the robot to move with a certain velocity?”
The key property of omni-wheels is that they roll without slipping in the steering direction, but roll freely in the perpendicular direction (sometimes called the slipping direction). In Figure 3, these directions correspond to the unit vectors \(u_\|\) (steering direction) and \(u_\perp\) (slipping direction). These vectors define an orthogonal decomposition of the robot’s motion. The wheel actuators directly produce motion in the direction \(u_\|\), and the robot moves freely in the direction \(u_\perp\).

The vectors \(u_\|\) and \(u_\perp\) are defined in the local coordinate frame of the robot, but since our robot does not rotate, we can define them directly in the world coordinate frame. Let \(\theta\) denote the angle from the world \(x\)-axis to the axle axis of the wheel. The vectors \(u_\|\) and \(u_\perp\) are given by
When an object moves with a purely translational motion (i.e., there is no rotation), every point on the object moves with the same velocity. Suppose that the robot, and therefore this specific wheel, moves with the translational velocity \(v=(v_x, v_y)\), as shown in Figure 4. We can decompose the velocity \(v\) into components that are parallel and perpendicular to the steering direction by projecting \(v\) onto the vectors \(u_\|\) and \(u_\perp\).

In particular, we can write
which gives
Note that in the above equation there is some possible confusion in the notation: \(u_\|\) and \(u_\perp\) are unit vectors that denote directions of motion, while \(v_{\parallel}\) and \(v_{\perp}\) are scalar quantities (the speed in the directions of the unit vectors \(u_\|\) and \(u_\perp\), respectively).
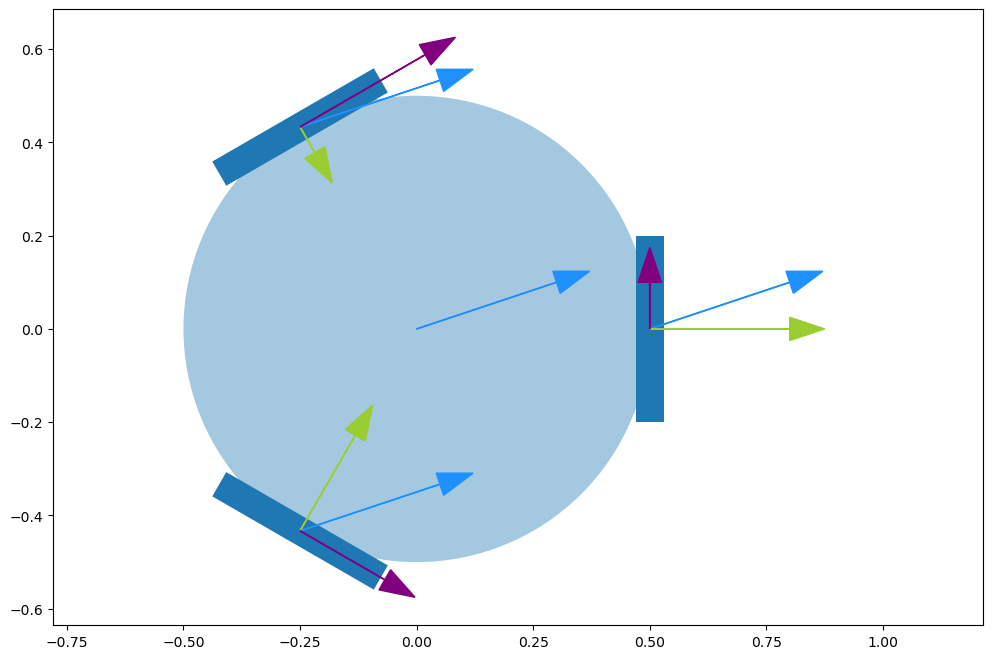
In code:
def wheel_velocity(vx:float, vy:float, i:int):
"""Calculate parallel and perpendicular velocities at wheel i"""
_, _, theta = wheel_pose(i)
para = - vx * np.sin(theta) + vy * np.cos(theta)
perp = vx * np.cos(theta) + vy * np.sin(theta)
return para, perp
In Figure 5 we use this to show how the desired velocity (in blue) translates graphically to parallel (purple) and perpendicular (green) velocity components at the wheel sites.
4.2.3. The Jacobian Matrix#
As mentioned above, the motion perpendicular to the wheel is not resisted by the rollers: they will roll freely at exactly the right speed to accommodate any movement in this direction. Because this allows the wheel to “slide”, we also call this the sliding direction.
On the other hand, the contact of each wheel must move exactly opposite to the parallel or driving direction of the velocity. As a consequence, if the radius of each wheel is \(r\), the wheel’s angular velocity \(\omega^i\) (i.e., the angular rate at which the wheel spins about its axle) must satisfy
Because we have three wheels, we can stack three instances of the above equation to obtain a matrix equation that maps a desired robot velocity \(v=(v_x,v_y)\) to the appropriate commanded wheel velocities:
in which the \(3\times2\) matrix is called the Jacobian matrix.
For the three regularly arranged omni wheels with \(\theta^1=0\), \(\theta^2=2\pi/3\), and \(\theta^3=4\pi/3\) this becomes
def jacobian_matrix():
"""Compute matrix converting from velocity to wheel velocities."""
rows = []
for i in range(num_wheels):
_, _, theta = wheel_pose(i)
rows.append([-np.sin(theta), np.cos(theta)])
return np.array(rows)/r
We can verify that doing the matrix-velocity multiplication yields the same result as using the wheel_velocity function:
for i in range(3):
para, perp = wheel_velocity(vx, vy, i)
print(f"wheel {i}: {para/r}")
print("\nUsing matrix method:")
print(jacobian_matrix() @ gtsam.Point2(vx, vy))
wheel 0: 0.5
wheel 1: -1.549038105676658
wheel 2: 1.0490381056766573
Using matrix method:
[ 0.5 -1.54903811 1.04903811]
4.2.4. Omni-directional Movement in Practice#
Expressing motion relative to a reference coordinate frame.
To summarize, given a velocity, \(v\), in the robot’s body coordinates, we compute the corresponding vector of angular wheel velocities using the Jacobian mapping, \(\omega = Jv\). The above exposition can be directly generalized to an arbitrary number of wheels, mounted in arbitrary locations. Some care needs to be taken that the chosen configuration is not singular, which would result in the robot being able to move only in one particular direction (or not at all!).
In general, we would like to be able to specify the robot’s direction of motion relative to arbitrary coordinate frames, e.g., to a fixed warehouse coordinate frame, or a world coordinate frame. In this chapter we have assumed that the robot orientation is aligned with the warehouse orientation, so conveniently velocity vectors in either frame have the same coordinates. However, if we were to include the robot’s orientation in the state representation, we would need to rotate the desired world velocity into the body coordinate frame. We will see how to do this later in this book.
If we do care about orientation, omni wheels can actually be used to rotate the robot as well as to induce pure translational motion. Think about applying the same constant angular velocity to all three wheels: the robot will now simply rotate in place. To represent this mathematically, we could add a third column to the Jacobian matrix that maps a desired angular velocity into wheel velocities. This would allow us to command any combination of linear and angular velocity to the robot.
Finally, there is a more general type of wheel, the “mecanum wheel”, for which the rollers are not aligned with the wheel rim, but are rotated by some (constant) amount. That complicates the math a little bit, but in the end we will again obtain a Jacobian matrix that maps robot velocity to wheel angular velocities. We will not discuss this further.
4.2.5. A Gaussian Dynamic Bayes Net#
Modeling stochastic action in continuous spaces can again be done using DBNs.
Modeling with continuous densities can be done with continuous dynamic Bayes nets (DBNs). Omni-wheels are notoriously flaky in the execution, especially on uneven ground or carpet. Hence, it is important to model the uncertainty associated with commanded movements. If we are model our robot as a discrete-time system, \(u_k = v \Delta T\) is the displacement that occurs when the robot moves with constant velocity \(v\) for time \(\Delta T\). Since the velocity can be in any direction, we have \(u_k\in\mathbb{R}^2\). In the absence of uncertainty, our motion model would simply be \(x_{k+1} = x_k + u_k\).
Given the uncertainty inherent to the use of omni-wheels, we will instead develop a probabilistic motion model. Recall that we created a DBN with discrete actions, states, and measurements in the previous chapter. Here we do the same, except with continuous densities, specifying a DBN that encodes the joint density \(p(X|U)\) on the continuous states \(X\doteq\{x_k\}_{k=1}^N\),
where we assume that the control variables \(U\doteq\{u_k\}_{k=1}^{N-1}\) are given to us.
Let us assume we know that the robot starts out in the warehouse at coordinates \(\mu_1 =(20,10)^T\), with some noise/error in position of magnitude on the order of plus or minus half a meter. We can encode this knowledge into a continuous Gaussian prior as
with the covariance matrix \(P=\text{diag}(0.5^2,0.5^2)\).
A Gaussian motion model is a bit trickier. Here we need a conditional Gaussian density that depends on the current state and the commanded motion. The usual way to incorporate uncertainty into a motion model is to assume that a random disturbance is added to the nominal motion of the robot. We can model this as
in which \(w_k\) is a random vector whose probability distribution is typically based on empirical observations of the system. In our case, we will assume that this disturbance is Gaussian, \(w_k \sim N(\mu,\Sigma)\). In this case, it can be shown that the conditional distribution of \(x_{k+1}\) given \(x_k\) and \(u_k\) is given by a conditional Gaussian density of the form
i.e., the conditional distribution for the next state is a Gaussian, with mean equal to the nominal (i.e., noise-free) next state \(x_k + u_k\), and variance equal to the variance of the uncertainty in the motion model.
It is easy to generalize this motion model to linear systems of the form
which is the general form for a linear time-invariant (LTI) system with additive noise. The matrix \(A \in \mathbb{R}^{n \times n}\) is called the system matrix, and the matrix \(B\) maps control input \(u_k\) to a vector in the state space. The motion model for this general LTI system is given by
where \(Q\) is the traditional symbol used for motion model covariance. If we assume the robot executes action \(u_k\) with a standard deviation of 0.2m, then we will have \(Q=\text{diag}(0.2^2,0.2^2)\).
4.2.6. Gaussian DBNs in Code#
In GTSAM, a Gaussian density is specified using the class GaussianDensity, which corresponds to a negative log-probability given by
with a named constructor FromMeanAndStddev that takes \(\mu\) and \(\sigma\) as arguments.
For their part, Gaussian conditional densities are specified using the class GaussianConditional, which correspond to a negative log-probability given by
i.e., the mean on \(x\) is a linear function of the conditioning variables \(p_1\) and \(p_2\). Again, a named constructor FromMeanAndStddev is there to assist us. Details are given in the GTSAM 101 section at the end of this section, as always.
All of the above is used in the following piece of code, which builds the dynamic Bayes net in Figure 6.
gaussianBayesNet = gtsam.GaussianBayesNet()
A, B = np.eye(2), np.eye(2)
motion_model_sigma = 0.2
for k in reversed(indices[:-1]):
gaussianBayesNet.push_back(gtsam.GaussianConditional.FromMeanAndStddev(
x[k+1], A, x[k], B, u[k], [0, 0], motion_model_sigma))
p_x1 = gtsam.GaussianDensity.FromMeanAndStddev(x[1], [20,10], 0.5)
gaussianBayesNet.push_back(p_x1)
#| caption: A Gaussian dynamic Bayes net.
#| label: fig:gaussian_bayes_net
position_hints = {'u': 2, 'x': 1}
show(gaussianBayesNet, hints=position_hints, boxes=set(list(u.values())))

4.2.6.1. Exercise#
Note that we used a constant motion model noise here, which is perhaps unrealistic: if a robot is commanded to go further, it could be expected to do a worse job at going exactly the distance it was supposed to go. How could you modify the above code to account for that?
4.2.7. Simulating a Continuous Trajectory#
Bayes nets are great for simulation.
Let us now create a simulated trajectory in our example warehouse, by specifying a “control tape” and using the dynamic Bayes net created above to do the heavy lifting for us:
control_tape = gtsam.VectorValues()
for k, (ux,uy) in zip(indices[:-1], [(2,0), (2,0), (0,2), (0,2)]):
control_tape.insert(u[k], gtsam.Point2(ux,uy))
control_tape
| Variable | value |
|---|---|
| u1 | 2 0 |
| u2 | 2 0 |
| u3 | 0 2 |
| u4 | 0 2 |
gaussianBayesNet.sample(control_tape)
| Variable | value |
|---|---|
| u1 | 2 0 |
| u2 | 2 0 |
| u3 | 0 2 |
| u4 | 0 2 |
| x1 | 20.3525 9.71295 |
| x2 | 21.9712 9.56813 |
| x3 | 23.9742 9.77767 |
| x4 | 23.9099 11.6501 |
| x5 | 23.7314 13.1453 |
4.2.8. GTSAM 101#
The GTSAM concepts used in this section, explained.
A GaussianDensity class can be constructed via the following named constructor:
FromMeanAndStddev(key: gtsam.Key, mean: np.array, sigma: float) -> gtsam.GaussianDensity
and two similar named constructors exists for GaussianConditional:
- FromMeanAndStddev(key: gtsam.Key, A: np.array, parent: gtsam.Key, b: numpy.ndarray[numpy.float64[m, 1]], sigma: float) -> gtsam.GaussianConditional
- FromMeanAndStddev(key: gtsam.Key, A1: np.array, parent1: gtsam.Key, A2: np.array, parent2: gtsam.Key, b: np.array, sigma: float) -> gtsam.GaussianConditional
Both classes support some other methods that can come in handy, as demonstrated here on the prior created above:
print(p_x1) # printing
values = gtsam.VectorValues()
values.insert(x[1], [19,12])
e = p_x1.unweighted_error(values)
print(f"unweighted error vector = {e}")
w = p_x1.error_vector(values)
print(f"weighted error vector = {w}")
E = p_x1.error(values)
print(f"error 0.5 w'*w = {E}")
assert E == 0.5 * w.dot(w) # check 10 == (4+16)/2
GaussianDensity: density on [x1]
mean: [20; 10];
covariance: [
0.25, 0;
0, 0.25
]
isotropic dim=2 sigma=0.5
unweighted error vector = [-1. 2.]
weighted error vector = [-2. 4.]
error 0.5 w'*w = 10.0
In the above, all error functions take an instance of VectorValues, which is simply a map from GTSAM keys to values as vectors. This is the equivalent of DiscreteValues from the previous sections.